

čb┼õÖCŲ„╚╦į┌ū„śI(y©©)▀^│╠ųąąĶę¬┼cų▄ć·Łh(hu©ón)Š│Įėė|Ż¼į┌Įėė|Ą─▀^│╠ųą═∙═∙┤µį┌┴”║═╦┘Č╚Ą─▓╗▀B└m(x©┤)å¢Ņ}ĪŻ═¾┴”é„ĖąŲ„░▓čbį┌ÖCŲ„╚╦╩ų▒█║═─®Č╦ł╠(zh©¬)ąąŲ„ų«ķgŻ¼Ė³ĮėĮ³┴”Ą─ū„ė├³cŻ¼╩▄Ųõ╦¹ĖĮ╝ėę“╦žĄ─ė░Ēæ▌^ąĪŻ¼┐╔ęį£╩┤_ĄžÖz£y─®Č╦ł╠(zh©¬)ąąŲ„╦∙╩▄═Ō┴”/┴”ŠžĄ─┤¾ąĪ║═ĘĮŽ“Ż¼×ķÖCŲ„╚╦╠ß╣®┴”Ėąą┼ŽóŻ¼ėąą¦ĄžöUš╣┴╦ÖCŲ„╚╦Ą─ū„śI(y©©)─▄┴”ĪŻ
į┌čb┼õÖCŲ„╚╦ųą│²╩╣ė├æ¬ūāŲ¼6ŠS═▓╩Į═¾┴”é„ĖąŲ„║═╩«ūų┴║═¾┴”é„ĖąŲ„═ŌŻ¼▀Ć┤¾┴┐╩╣ė├ ╚ßĒś═¾┴”é„ĖąŲ„ĪŻ╚ßąį╩ų═¾─▄į┌ÖCŲ„╚╦Ą──®Č╦▓┘ū„Ų„┼cŁh(hu©ón)Š│Įėė|Ģr«a(ch©Żn)╔·ūāą╬Ż¼▓óŪę─▄ē“╬³╩š ÖCŲ„╚╦Ą─Č©╬╗š`▓ŅĪŻÖCŲ„╚╦╚ßąį═¾┴”é„ĖąŲ„īó╚ßąį╩ų═¾┼c═¾┴”é„ĖąŲ„ėąÖCĄžĮY(ji©”)║Žį┌ę╗ŲŻ¼▓╗ Ą½┐╔ęį×ķÖCŲ„╚╦╠ß╣®┴”/┴”Šžą┼ŽóŻ¼Č°Ūę▒Š╔Ēėų╩Ū╚ßĒśÖCśŗ(g©░u)Ż¼┐╔ęį«a(ch©Żn)╔·▒╗äė╚ßĒśŻ¼╬³╩šÖCŲ„' ╚╦«a(ch©Żn)╔·Ą─Č©╬╗š`▓ŅŻ¼▒ŻūoÖCŲ„╚╦Īó─®Č╦▓┘ū„Ų„║═ū„śI(y©©)ī”Ž¾Ż¼╠ßĖ▀ÖCŲ„╚╦Ą─ū„śI(y©©)─▄┴”ĪŻ
╚ßąį═¾┴”é„ĖąŲ„ę╗░Ńė╔╣╠Č©¾wĪóęŲäė¾w║═▀BĮėČ■š▀Ą─ÅŚąį¾wĮM│╔ĪŻ╣╠Č©¾w║═ÖCŲ„╚╦Ą─╩ų ═¾▀BĮėŻ¼ęŲäė¾w║═─®Č╦ł╠(zh©¬)ąąŲ„ŽÓ▀BĮėŻ¼ÅŚąį¾w▓╔ė├Šžą╬Įž├µĄ─ÅŚ╗╔Ż¼Ųõ╚ßĒś╣”─▄Š═╩Ūė╔─▄«a(ch©Żn) ╔·ÅŚąįūāą╬Ą─ÅŚ╗╔═Ļ│╔ĪŻ╚ßąį═¾┴”é„ĖąŲ„└¹ė├£y┴┐ÅŚąį¾wį┌┴”/┴”ŠžĄ─ū„ė├Ž┬«a(ch©Żn)╔·Ą─ūāą╬┴┐ üĒėŗ╦Ń┴”/┴”ŠžĪŻ
╚ßąį═¾┴”é„ĖąŲ„Ą─╣żū„įŁ└Ē╚ńłD6-24╦∙╩ŠŻ¼╚ßąį═¾┴”é„ĖąŲ„Ą─ā╚(n©©i)Łh(hu©ón)ŽÓī”ė┌═ŌŁh(hu©ón)Ą─╬╗ų├ ║═ū╦æB(t©żi)Ą─£y┴┐▓╔ė├ĘŪĮėė|╩Į£y┴┐ĪŻé„Ėąį¬╝■ė╔6éĆŠ∙▓╝į┌ā╚(n©©i)Łh(hu©ón)╔ŽĄ─╝t═Ō░l(f©Ī)╣ŌČ■śO╣▄ (LED) ║═6éĆŠ∙▓╝į┌═ŌŁh(hu©ón)╔ŽĄ─ŠĆą═╬╗ų├├¶Ėąį¬╝■ (PSD) śŗ(g©░u)│╔ĪŻPSD ═©▀^▌ö│÷─ŻöMļŖ┴„ą┼╠¢üĒĘ┤ė│ šš╔õį┌Ųõ├¶Ėą├µ╔Ž╣Ō³cĄ─╬╗ų├Ż¼Š▀ėąĘų▒µ┬╩Ė▀Īóą┼╠¢Öz£yļŖ┬Ę║åå╬ĪóĒææ¬╦┘Č╚┐ņĄ╚ā×(y©Łu)³cĪŻ
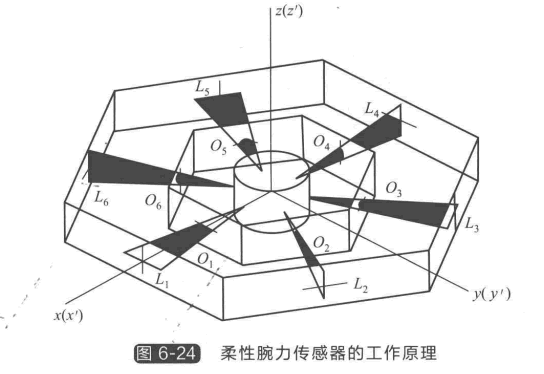
×ķ┴╦▒ŻūCLED ░l(f©Ī)│÷Ą─╝t═Ō╣Ōą╬│╔ę╗éĆ╣ŌŲĮ├µŻ¼į┌├┐ę╗éĆLED Ą─Ū░ĘĮ░▓čb┴╦ę╗éƬM┐pŻ¼ ¬M┐p░┤šš┤╣ų▒║═╦«ŲĮĘĮ╩ĮķgĖ¶Ę┼ų├Ż¼┼cų«ī”æ¬Ą─ŠĆą═ PSD ät░┤šš┼c¬M┐pŽÓ┤╣ų▒Ą─ĘĮ╩ĮĘ┼ų├ĪŻ 6 éĆLED ╦∙░l(f©Ī)│÷Ą─╝t═Ō╣Ō═©▀^ŲõŪ░Č╦Ą─¬M┐pą╬│╔6éĆ╣ŌŲĮ├µO;(i=1,2,ĪŁ,6), ┼c 6 éĆ ŽÓ æ¬Ą─ŠĆą═ PSD L;(i=1,2,ĪŁ,6) ą╬│╔6éĆĮ╗³cĪŻ«öā╚(n©©i)Łh(hu©ón)ŽÓī”ė┌═ŌŁh(hu©ón)ęŲäėĢrŻ¼6éĆĮ╗³cį┌ PSD ╔ŽĄ─╬╗ų├░l(f©Ī)╔·ūā╗»Ż¼ę²ŲPSD Ą─▌ö│÷ūā╗»ĪŻĖ∙ō■(j©┤)PSD ▌ö│÷ą┼╠¢Ą─ūā╗»Ż¼┐╔ęįŪ¾Ą├ā╚(n©©i)Łh(hu©ón) ŽÓī”ė┌═ŌŁh(hu©ón)Ą─╬╗ų├║═ū╦æB(t©żi)ĪŻā╚(n©©i)Łh(hu©ón)Ą─▀\äėīóę²Ų▀BĮėÅŚ╗╔Ą─ŽÓæ¬ūāą╬Ż¼┐╝æ]ĄĮÅŚ╗╔Ą─ū„ė├┴”┼c ą╬ūāĄ─ŠĆąįĻPŽĄŻ¼┐╔ęį═©▀^ā╚(n©©i)Łh(hu©ón)ŽÓī”ė┌═ŌŁh(hu©ón)Ą─╬╗ų├║═ū╦æB(t©żi)ĻPŽĄĮŌ╦Ń│÷ā╚(n©©i)Łh(hu©ón)╔Ž╦∙╩▄ĄĮĄ─┴”║═┴” ŠžĄ─┤¾ąĪŻ¼Å─Č°═Ļ│╔╚ßąį═¾┴”é„ĖąŲ„Ą─╬╗ū╦║═┴”/┴”ŠžĄ─═¼Ģr£y┴┐ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



