╦┘Č╚é„ĖąŲ„ė├ė┌£y┴┐ŲĮęŲ║═ą²▐D▀\äėĄ─╦┘Č╚ĪŻį┌┤¾ČÓöĄŪķørŽ┬Ż¼ų╗Ž▐ė┌£y┴┐ą²▐D╦┘ Č╚Ż¼ę“×ķ£y┴┐ŲĮęŲ╦┘Č╚ąĶę¬ĘŪ│Ż╠ž╩ŌĄ─é„ĖąŲ„ĪŻ
«öė╔ļŖ╬╗ėŗ£y┴┐ŲĮęŲ╗“ą²▐DĢrŻ¼Ųõą┼╠¢─▄ē“ė╔ļŖūėŠĆ┬Ęę²│÷ĪŻĄ½╩ŪŻ¼ī”ė┌╦┘Č╚é„ĖąŲ„ üĒšfŻ¼▀@╩Ū▓╗ąąĄ─ĪŻ╬╗ęŲĄ─ī¦öĄ(╝┤╦┘Č╚)─▄ē“ė├ėŗ╦ŃÖCėŗ╦ŃŻ¼╝┤╚ĪĄ├║▄ąĪĢrķgķgĖ¶ā╚Ą─╬╗ ų├▓╔śėŻ¼į┌ĮoČ©Ģrķgā╚Ą─├}ø_öĄ┐╔ęįėŗ╦Ń│÷üĒĪŻ▀@ĘNĘĮĘ©ėąéĆā׳cŻ¼╝┤£y┴┐╦┘Č╚┐╔╣▓ė├ę╗ éĆé„ĖąŲ„(└²╚ńį÷┴┐╩Įé„ĖąŲ„),ę“Č°į┌ĮoČ©³cĖĮĮ³─▄ē“╠ß╣®┴╝║├Ą─╦┘Č╚┐žųŲĪŻ▀@ĘNŪķør▀m ė├ė┌╦∙ėąŲõ╦¹«a╔·├}ø_Ą─╦┘Č╚é„ĖąŲ„ĪŻ
╣ŌļŖĘĮĘ©╩Ūūī╣Ōšš╔õą²▐DłA▒P(«ŗėąę╗Č©║┌░ūŠĆŚl),īóŲõĘ┤╔õ╣ŌĄ─ÅŖ╚§▀Mąą├}ø_╗»╠Ä └Ēų«║¾Ż¼Öz£y│÷ą²▐DŅl┬╩║═├}ø_öĄ─┐Ż¼ęįŪ¾│÷ĮŪ╬╗ęŲŻ¼╝┤ą²▐DĮŪČ╚ĪŻ▀@ĘNą²▐DłA▒P┐╔ųŲ│╔ Ħėą┐pŽČĄ─Ż¼═©▀^ā╔éĆ╣ŌļŖČ■śO╣▄Š═─▄ē“▒µäe│÷ĮŪ╦┘Č╚ĪŻ▀@╩Ūę╗ĘN╣ŌļŖ├}ø_╩Į▐D╦┘é„ ĖąŲ„ĪŻ
Z═©ė├Ą─╦┘Č╚é„ĖąŲ„¤oę╔╩Ū£y╦┘░lļŖÖCŻ¼ų„ę¬ėąā╔ĘNŻ║ų▒┴„£y╦┘░lļŖÖC║═Į╗┴„£y╦┘░l ļŖÖCĪŻ
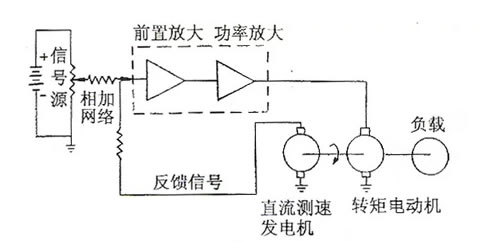
ų▒┴„£y╦┘░lļŖÖCĄ─æ¬ė├Ė³×ķŲš▒ķĪŻ╦³é„╦═ę╗éĆš²▒╚ė┌╩▄┐ž╦┘Č╚Ą─ų▒Įėą┼╠¢ĪŻ▀@ĘNé„Ėą Ų„Ą─▀xō±╩Ūė╔ŲõŠĆąįČ╚(┐╔▀_0.1%)Īó┤┼£■│╠Č╚ĪóZ┤¾┐╔ė├╦┘Č╚(▀_3000Ī½8000r/min) ęį ╝░æT┴┐ģóöĄøQČ©Ą─ĪŻ░č£y╦┘░lļŖÖCų▒ĮėĮėį┌ų„▌S╔Ž┐é╩ŪėąęµĄ─Ż¼ę“×ķ▀@śė┐╔╩╣╦³ęį┐╔─▄▀_ ĄĮĄ─ZĖ▀▐D╦┘ą²▐DĪŻ
Į╗┴„£y╦┘░lļŖÖCæ¬ė├▌^╔┘Ż¼╦³╠žäe▀mė├ė┌▀b┐žŽĄĮyĪŻ┤╦═ŌŻ¼«ö╦³┼c┐╔š{ūāē║Ų„╩Į╬╗ų├ é„ĖąŲ„▀Bė├ĢrŻ¼ų╗ę¬ė╔ŽÓ═¼Ą─Ņl┬╩┐žųŲŻ¼Š═─▄ē“░čā╔š▀Ą─▌ö│÷ą┼╠¢ĮY║ŽŲüĒĪŻ
ų▒ŠĆęŲäėé„ĖąŲ„ėąļŖ╬╗ėŗ╩Įé„ĖąŲ„║═┐╔š{ūāē║Ų„ā╔ĘN;ūŅ│ŻęŖĄ─╬╗ęŲé„ĖąŲ„╩Ūų▒ŠĆ╩ĮļŖ╬╗ėŗ,«öžō▌dļŖūĶ×ķ¤oĖF┤¾ĢrŻ¼ļŖ╬╗ėŗĄ─▌ö│÷ļŖē║u₂ ┼c ļŖ ╬╗ ėŗā╔Č╬Ą─ļŖūĶ│╔▒╚└²
ÖCŲ„╚╦╣żū„šŠā╚Ą─é„ĖąŲ„ų„ę¬ė├ė┌ķgĮė╠ß╣®ųąķgėŗ╦ŃĮY╣¹╗“ų▒Įė╠ß╣®╚╬äš│╠ą“ųą╚╬║╬čėŲ┌öĄō■ųĄ;ę╗éĆĘŪĮėė|╩Įé„ĖąŲ„ī”─▄┴┐░l╔õčbų├╦∙«a╔·Ą─Ė╔ö_═∙═∙╩Ū║▄├¶ĖąĄ─
▀^ė▓╝■░čŽÓĻP─┐ś╦╠žąį▐DōQ×ķą┼╠¢;░č╦∙½@ą┼╠¢ūāōQ×ķęÄäØ╝░ł╠ąą─│éĆÖCŲ„╚╦╣”─▄╦∙ąĶꬥ─ą┼ŽóŻ¼░³└©ŅA╠Ä └Ē║═ĮŌßīā╔éĆ▓Į¾E,▀@ĘNą┼Žó┐╔▒╗Ę┤üęįą▐ š²║═ųžÅ═įōĖąėXĒśą“Ż¼ų▒ų┴Ą├ĄĮ╦∙ąĶꬥ─ą┼Žó×ķų╣
é„ĖąŲ„ė÷ĄĮ╠žČ©ÜŌ╬ČĢ■«a╔·ļŖūĶ╗“š▀Ņl┬╩Ą─ūā╗»Ż¼╬ęéāŠ═╩Ūīó▀@ą®ūā ╗»▓ČūĮĄĮŻ¼▓ó▐D╗»│╔─▄ē“é„▀fĄ─ļŖą┼╠¢Ż¼╚╗║¾ī”é„ĖąŲ„Ļć┴ąé„╚ļĄ─ą┼╠¢▀Mąą×V ▓©ĪóĘ┼┤¾║═╠žš„╠ß╚Ī
▓┐ŽÓĻP┬ō║»öĄ(Head-Related Transfer Function,HRTF)Ę©ĪóĢrčė╣└ėŗ(Time Delay Of Arrival,TDOA) Ę©Īó╗∙ė┌ūŅ┤¾▌ö│÷╣”┬╩Ą─┐╔┐ž▓©╩°ą╬│╔ĘĮĘ©Īó╗∙ė┌Ė▀Ęų▒µ┬╩ūV ╣└ėŗĄ─Č©╬╗ĘĮĘ©Īó╔±ĮøŠWĮjČ©╬╗ĘĮĘ©║═╗∙ė┌┬Ģē║Ę∙Č╚▒╚Ą─Č©╬╗ĘĮĘ©Ą╚
╩ūŽ╚ę¬░čįÆę¶ĘųĖŅ│╔å╬į~(╗“ę¶╦ž),╚╗║¾▀MąąšZĘ©Ęų╬÷,ūŅ║¾▒µūR│÷įÆ궥─║¼┴x,ė├Ą├ūŅČÓĄ─╩Ū─Ż╩ĮŲź┼õĘĮĘ©,╚ńĮyėŗ─Żą═Ą─ļ[Markov─Żą═,į┌┤¾į~ģR┴┐Ą─šZ ę¶ūRäe╔Ž╚ĪĄ├┴╦║▄┤¾Ą─▀Mš╣
┤_Č©ūRäeĘĮĘ©╦∙ė├Ą─╠žš„;īóĮė╩šĄĮĄ─įÆę¶╠ß╚Ī╠žš„ŠžĻć;┼c╩┬Ž╚┤µā”į┌ŽĄĮyų«ā╚Ą─ś╦£╩─Ż░ÕųąĄ─╠žš„ŠžĻćŽÓ▒╚▌^Ż¼ėŗ╦Ń╦³éāĄ─ŠÓļx;┤_Č©╦∙šfĄ─įÆ╩Ū╩▓├┤
TOP5 ÅS╔╠Ę▌Ņ~ŠS│ųį┌ 60%,Ė„╝ęÅS╔╠ĘeśOīżŪ¾═╗ŲŲŻ¼┼┼├¹ŪąōQ╝ż┴ęĪŻš¹éĆģfū„ÖCŲ„╚╦╩ął÷ģó┼c═µ╝ęš²į┌▓╗öÓį÷ČÓŻ¼ ╩ął÷ę▓Ģ║╬┤Č©ą═Ż¼Ė„ŅÉ═µ╝ęąŅä▌┤²░l
▒Š═┴ģfū„ÖCŲ„╚╦Ų¾śIš╣¼FŲõžSĖ╗Ą─ĮŌøQĘĮ░Ė╝░Ė▀ąįār▒╚,Ę÷│ųš■▓▀×ķÖCŲ„╚╦ąąśIĄ─┐ņ╦┘░lš╣╠ß╣®┴╦▒ŻšŽ;ģfū„ÖCŲ„╚╦Š▀ėąĖ³ÅVĄ─æ¬ė├čėš╣ąįį┌╣żśIŅIė“æ¬ė├║═ĘŪ╣żśIŅIė“ķ_═žą┬ł÷Š░
Ų▓ĮŲ┌Ż©2015-2017 ─Ļ)╚╦ÖC╣▓╚┌ųØu│╔×ķąąśI░lš╣Ą─║╦ą─ĘĮŽ“┼c╩ął÷ų„┴„┌ģä▌;š{š¹Ų┌Ż©2018-2019 ─ĻŻ®▀M╚ļą▐¤Æā╚╣”Ą─ļAČ╬;ĘĆ▓ĮŲ┌Ż©2022-2024 ─ĻŻ®š╣¼F│÷┴╦Ųõ░lš╣Ą─ÅŖä┼Ēgąį┼cØō┴”
═©▀^ļŖ┴„ŁhĪóĻP╣Ø┴”Šžé„ĖąŲ„Īó░▓╚½Ųż─wī”═Ō▓┐┴”ėX▀MąąĖąų¬Ż¼Å─Č°▀_│╔ī”Ī░┼÷ū▓Ī▒Ą─ėąą¦Öz£y;ļŖ┤┼▒¦äxķlÅ─Įė╩šĄĮųŲäėą┼╠¢ĄĮ═Ļ│╔ųŲäėĄ─Ēææ¬Ģrķg┐╔┐žųŲį┌ 50ms ęįā╚
2D ╝╝ągŲ▓Į▌^įńŻ¼╝╝ąg║═æ¬ė├ę▓ŽÓī”│╔╩ņ;3D ęĢėXĖ³ĮėĮ³╚╦č█Ż¼Ųõ║╦ą─į┌ė┌ī” 3D Äū║╬öĄō■Ą─▓╔╝»║═└¹ė├,┐╔½@╚Ī╬’¾wĄ─╔ŅČ╚ą┼ŽóŻ¼īŹ¼FČÓŠSČ╚Č©╬╗ūRäe




